
传统的工业机器人、服务机器人没有相似皮肤的感知部件,只能靠着预设程序履行一些机械式指令,动作上充溢机械感。
跟着柔性资料和微纳加工技能的展开前进,电子皮肤应运而生。未来,贴附了电子皮肤的仿生、类人、可交互、动作丝滑、可自主达到方针的具身智能机器人,将逐渐替代依靠预设程序、无法感知交互、只能机械履行指令的传统机器人。
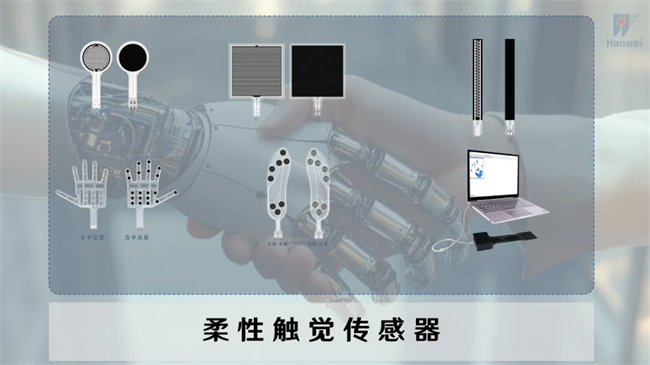
电子皮肤其实是一种阵列式柔性触觉传感器,有压阻式、电容式、压电式等多种技能原理。
其以聚二甲基硅氧烷PDMS、聚乙烯醇PVA等柔性资料为基底,以碳纳米管、石墨烯、导电聚合物等为活络资料,选用微纳加工技能制备而成。
小小一块电子皮肤就能够集成许多传感点,这些传感点能够收集压力、温度等多种信号,从而完成压力测验、温度检测、纹路辨认等功能。
据悉,国内闻名的传感器企业汉威科技,早在2013年就已开端布局柔性触觉传感器,现已构建了安稳的纳米活络资料系统,把握了柔性压阻、柔性压电、柔性电容、柔性汗液四大中心技能,具有了大面积阵列规划、活络资料及导电墨水组成制备、大面积印刷电子批量制作等中心才能,拥稀有条年产千万支柔性传感器的生产线。
基于此,汉威科技形成了自主知识产权的多种类、多量程的柔性触觉传感器,并已获得百余项中心专利。以柔性压力传感器为例,其归纳功能已达国际先进水平。

超轻薄,厚度小于0.3mm,与3张A4纸适当;超柔韧,重复曲折100万次,仍然可正常作业;超密布,可集成100个传感点/c㎡,分辨率比较高;超活络,茸毛轻轻拂过的力度,也能精准检测;超快速,从接触到呼应,只需不到1毫秒;可取舍,更好地贴合终端产品,满意特性需求。
现在,汉威科技正在与部分机器人公司展开协作,将柔性触觉传感器整合到机器人灵活手的指尖、指腹、手臂等部位。这将成为机器人履行杂乱、精密动作的重要感知根底。
未来,电子皮肤还将使用于人机交互、医疗健康、太空探究、仿生机器人等范畴,为VR游戏控制服、影视作品动作捕捉服、手术机器人、多自由度仿生假肢、烧伤患者植皮、太空探究多功能灵活手、超现实仿生机器人等供给感知根底。跟着柔性触觉传感器的继续不断的展开,更多电子皮肤的新资料、新结构、新工艺、新使用将不断涌现。


